Movement Assistance and Rehabilitation
Upper Limb Assistive and Rehabilitation Robotics
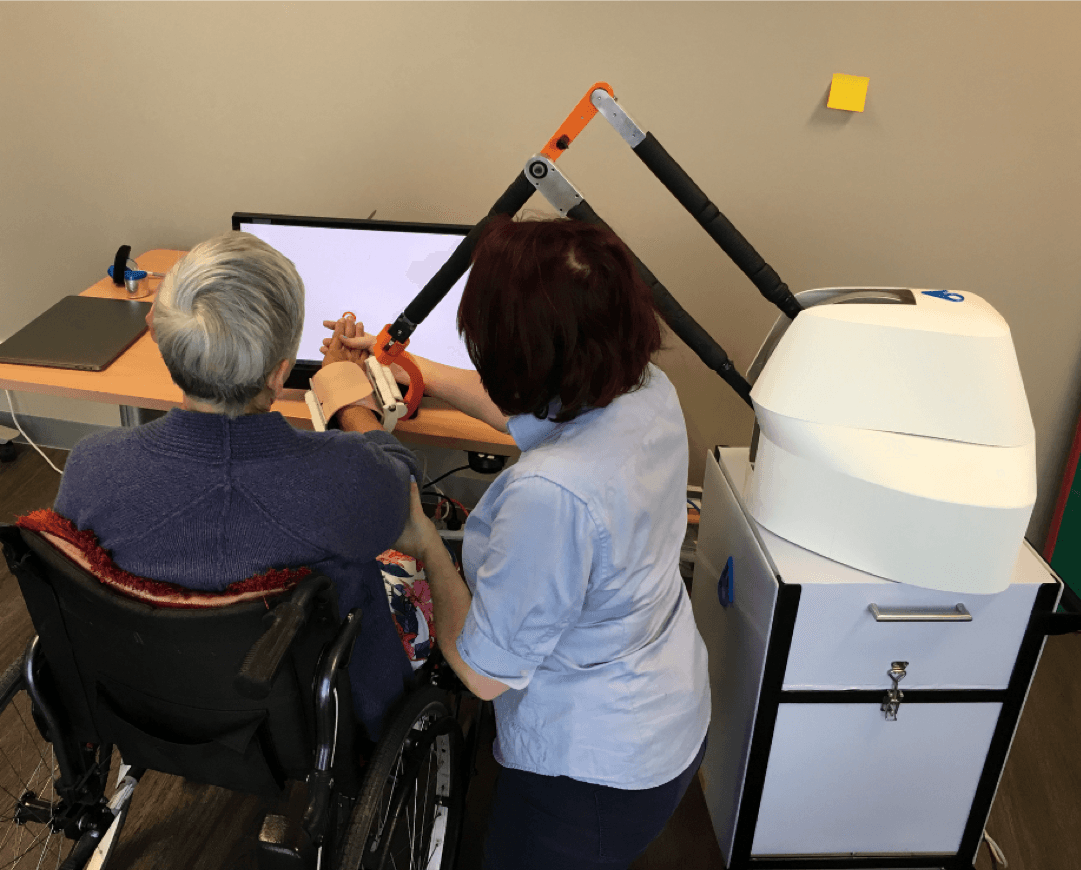
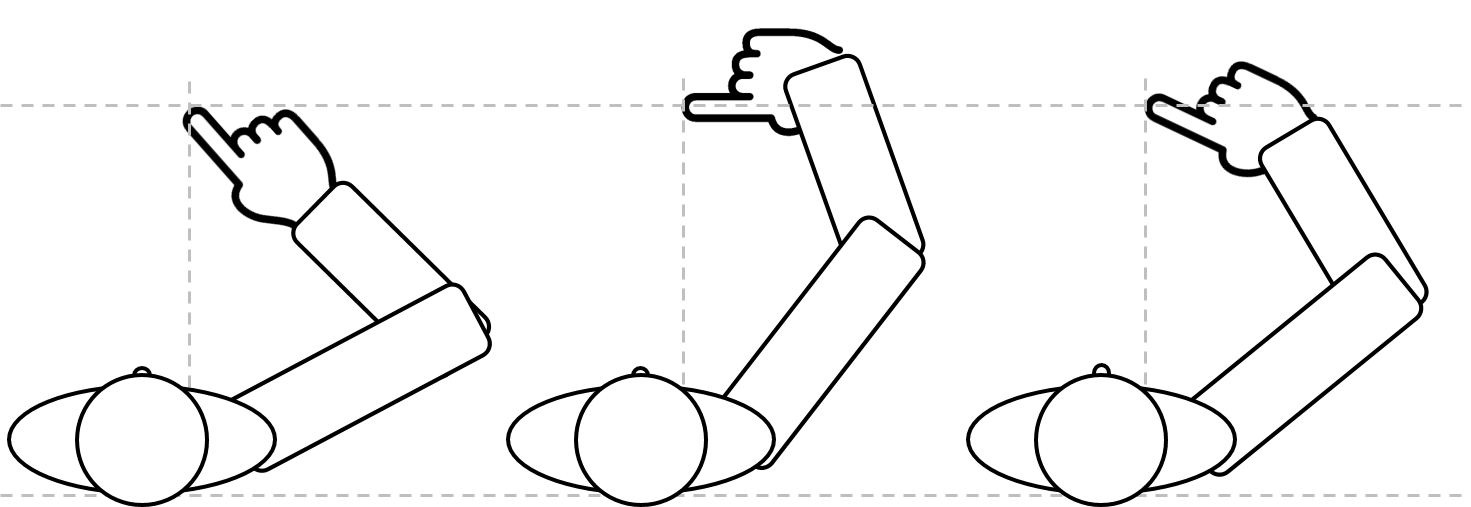
Our Upper Limb Robotics Project focuses on retraining motor function after a neurological injury, such as a stroke. Our robotic devices used within this space include the ArmMotus M2 from Fourier Intelligence, and the EMU – a device designed and developed within our laboratory. Our major focus within this project is to develop robotic control strategies which result in real motor control changes, using tools which can easily be adopted within a clinical setting. In collaboration with partners from the School of Heath Sciences, the Royal Melbourne Hospital and St Vincent’s Hospital we also study the use of such devices in actual clinical practice (as illustrated in this video).
Selected relevant publications:
- X. Guo, R. Wallace, Y. Tan, D. Oetomo, M. Klaic, and V. Crocher, Technology-assisted assessment of spasticity: a systematic review, Journal of NeuroEngineering and Rehabilitation, 2022.
- J. Fong, V. Crocher, M. Klaic, K. Davies, A. Rowse, E. Sutton, Y. Tan, D. Oetomo, K. Brock, and MP Galea, Promoting clinical best practice in a user-centred design study of an upper limb rehabilitation robot, Disability and Rehabilitation: Assistive Technology, 2020, doi:10.1080/17483107.2020.1785567
- V. Crocher, J. Fong, T. J. Bosch, Y. Tan, I. Mareels and D. Oetomo, Upper Limb Deweighting Using Underactuated End-Effector-Based Backdrivable Manipulanda, IEEE Robotics and Automation Letters, Vol. 3, Issue. 3, pp. 2116-2122, July 2018
Lower Limb Assistive and Rehabilitation Robotics
The Lower Limb Robotics Project explores the use of exoskeletons for both assistive and rehabilitative applications. Utilising the X2 Lower Limb Exoskeleton from Fourier Intelligence, we seek to explore the practical implications of using exoskeletons amongst those with neurological conditions, and develop robotic control strategies, with a focus on ensuring natural human interaction within the exoskeletons.

Selected relevant publications:
- X. Cheng, J. Fong, Y. Tan, and D. Oetomo, Optimising Balance Margin in Lower Limb Exoskeleton to Assist User-Driven Gait Stability, International Symposium on Wearable Robotics, pp. 75-80.
- X. Chen, X. Cheng, J. Fong, D. Oetomo, and Y. Tan, The Effect of Crutch Gait Pattern on Shoulder Reaction Force when Walking with Lower Limb Exoskeletons, 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), pp. 7574-7577.
- J. Fong, K. Bernacki, D. Pham, R. Shah, Y. Tan, and D. Oetomo, Exploring the Utility of Crutch Force Sensors to Predict User Intent in Assistive Lower Limb Exoskeletons, 2022 International Conference on Rehabilitation Robotics (ICORR).
Human Motor Control and Learning
Our Human Motor Control and Learning Project investigates theoretical constructs on how human move their limbs, and change their movements in response to changes in their environment – for example if they are given an unfamiliar tool, if their movement is disturbed by a new force, or if their sensory feedback is interfered with. The understanding developed within this work is used to inform how to develop the robotic control strategies which may be translated to assistive or rehabilitation applications.
Selected relevant publications:
- Y. Xu, V. Crocher, J. Fong, Y. Tan, and D. Oetomo, Inducing Human Motor Adaptation Without Explicit Error Feedback: A Motor Cost Approach, IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 29, pp. 1403-1412, 2021.
- V. Crocher, R. Singh, J. Newn, and D. Oetomo, Towards a Gaze-Informed Movement Intention Model for Robot-Assisted Upper-Limb Rehabilitation, 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), pp. 6155-6158.
Software tools
Part of the group activities include the development of software packages to ease research in physical Human-Robot Interaction. As part of the Movement Assistance and Rehabilitation activities, we have developed (and use!) the CANOpen Robot Controller framework available on GitHub. This framework allows flexible development of controllers for the different devices used within the laboratory: the ArmMotus M2, the X2 exoskeleton or the different version of EMU.
Associated publication:
- J. Fong, E. B. Küçüktabak, V. Crocher, Y. Tan, K. M. Lynch, J. L. Pons, and D. Oetomo, CANopen Robot Controller (CORC): An open software stack for human robot interaction development, International Symposium on Wearable Robotics, pp. 287-292.