Human Robot Co-evolution
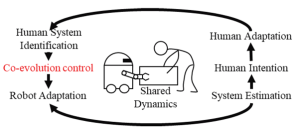
Our human robot co-evolution project focuses on how human-robot interaction can be configured to ensure the best team performance over long time periods of interaction. The major focuses of the project are to:
- model how human behaviour adapts to physical human robot interaction over long-term periods
- develop robot controllers that shape that human adaptation to provide the best team performance and learning without compromising the human’s behaviour when they are not engaged in human robot interaction.
The robots that we use in this space range from one degree of freedom robots developed in house, to commercially available robots such as the ArmMotus M2, UR3 and the EMU (a device originally designed within our laboratory). Our work is conducted with research partners such as the Australian Wool Industry and is intended to result in safer and more efficient human-robot interaction in actual workplace environments.
Selected relevant publications:
- E. Ivanova, J. Eden, G. Carboni, J. Krüger, and E. Burdet, Interaction with a reactive partner improves learning in contrast to passive guidance, Scientific Reports, vol. 12, no. 1, 2023.
- R. Garcia-Rosas, Y. Tan, D. Oetomo, C. Manzie, and P. Choong, Personalized Online Adaptation of Kinematic Synergies for Human-Prosthesis Interfaces, IEEE Transactions on Cybernetics, vol. 51, no. 2, pp. 1070–1084, 2021.
- S.H. Zhou, Y. Tan, D. Oetomo, C. Freeman, E. Burdet, and I. Mareels, Modeling of endpoint feedback learning implemented through point-to-point learning control, IEEE Transactions on Control Systems Technology, vol. 25, no. 5, pp. 1576–1585, 2017.