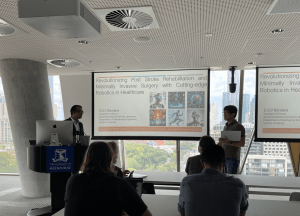
On 14th March, A/Prof Bandara, a visiting academic from Kyushu University, presented a guest lecture in the Manhari Room, Melbourne Connect. The lecture was on the topic of robot-assisted rehabilitation. This talk underscored the advancements and transformative approaches integrating cutting-edge robotics into post-stroke rehabilitation and minimally invasive surgery, thereby shaping the future of healthcare practices in these critical domains.
Journalist: Xinliang
We are pleased to announce that Jarvis has successfully passed his confirmation for his project “Wearable Haptic Feedback for Conveying Proprioception of Supernumerary Robotic Limbs” on 22nd Feb. We congratulate Jarvis for all of this hard work and look forward to his continued research progress!
Additionally, we extend our congratulations to Xinliang and Tianshi. Xinliang passed his confirmation on 28th Feb with his topic “Muscle Signal Based Interface for Responsive Physically-Assistive Robotics”, and on 13th March, Tianshi delivered his completion seminar for his research titled “Systematic Synthesis of Discrete-Pose Human Prosthetic Interfaces (HPIs)”. We applaud their milestones and wish them continued success in their research.



Journalist: Jon, Xinliang
On the romantic afternoon of 8th February, Zeyu and his beloved wife Fei celebrated their union in a wonderful ceremony held at the historic Old Treasury Building. The couple exchanged vows surrounded by friends, marking the beginning of their journey together. Lab members witnessed the start of a beautiful chapter in Zeyu and Fei’s lives.


Journalist: Xinliang, Photographer: Jarvis
We are thrilled to announce the recent milestones achieved by the members of our lab. Zeyu delivered his completion seminar, Murphy successfully passed his confirmation, YuXia officially graduated and earned the title of Dr. Xia, and Mingliang also presented his confirmation seminar. Join us in celebrating these incredible milestones!



Journalist: Xinliang
The lab gathered at Galbi BBQ on Dec 8th for the end-of-year party, celebrating their hard work and achievements from the year. People had a great time and enjoyed tasty Korean food!

Journalist: Xinliang
On November 27th, Xinliang received a Tutor Award from the Mechanical Engineering Department for his contribution in supporting and inspiring students. In this photo, Xinliang proudly shows off the final exam papers from his subject, along with the Certificate of Merit.
Congratulations, Xinliang!

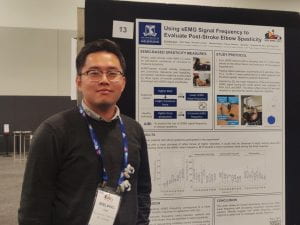
A group of lab members attended the 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC 2023), which took place in Sydney from July 24 to 27.
Jon organised a workshop entitled “Advances in Sensorimotor Augmentation” and presented his recent research findings along with other featured speakers. He also introduced his research about “A virtual reality platform to evaluate supernumerary limbs’ appearance” at the conference. The lab’s PhD candidates Jing, Tianshi, Jihoon, and Xinliang also presented their papers and engaged in discussions with academics and researchers about their work:
Jing – “Experimental validation on dual-frequency outperforms single-frequency SSVEP with large numbers of targets within a given frequency range”

Tianshi – Feasibility evaluation of online classification-based control for gross movement in a 2-DoF prosthetic arm”

Jihoon – “A preliminary usability study of integrated electronic tattoo surface electromyography (sEMG) sensors”

Xinliang – “Using sEMG Signal Frequency to Evaluate Post-Stroke Elbow Spasticity”
In addition to their academic pursuits, the attendees also caught some exciting moments from the Women’s World Cup 2023 in Sydney during their after-hour time. The match between France and Jamaica ended in a 0-0 draw.


Journalist: Xinliang
From September 24 to 28, Denny, Tomislav, and Mingrui attended the 2023 International Conference on Rehabilitation Robotics (ICORR) RehabWeek in Singapore. Mingrui presented his paper titled “Modelling human robot interface with different users, cuffs and strapping pressure: a case study” at the conference.

Journalist: Xinliang
Congratulations Mingrui for receiving the 2023 MedTech Actuator Menzies Scholarship!
The Scholarship encourages the next generation of health leaders to build strong foundations in commercialisation, supporting the scientific community’s capacity to bring innovation to market. Recipients embark on a four-month scholarship, where they gain knowledge from leading industry experts, work alongside Australia’s emerging healthcare entrepreneurs and receive mentorship from MedTech Actuator.
On August 17th and 20th, the university’s Science Festival and Open Day witnessed a standout showcase by the Human Robotics Lab, where their innovative robot, EMU, took centre stage. Drawing widespread acclaim, EMU exemplified the cutting-edge robotics research within the university. The entire university community extends gratitude to participants and anticipates future advancements.


And on social media!
Journalist: Murphy
Number of posts found: 40